medipixel/rl_algorithms

Structural implementation of RL key algorithms
| repo name | medipixel/rl_algorithms |
| repo link | https://github.com/medipixel/rl_algorithms |
| homepage | https://www.medipixel.io/ |
| language | Python |
| size (curr.) | 2051 kB |
| stars (curr.) | 259 |
| created | 2018-12-10 |
| license | Other |


![]()
![]()
Contents
Welcome!
This repository contains Reinforcement Learning algorithms which are being used for research activities at Medipixel. The source code will be frequently updated. We are warmly welcoming external contributors! :)
| BC agent on LunarLanderContinuous-v2 | RainbowIQN agent on PongNoFrameskip-v4 | SAC agent on Reacher-v2 |
Contributors
Thanks goes to these wonderful people (emoji key):
This project follows the all-contributors specification.
Algorithms
- Advantage Actor-Critic (A2C)
- Deep Deterministic Policy Gradient (DDPG)
- Proximal Policy Optimization Algorithms (PPO)
- Twin Delayed Deep Deterministic Policy Gradient Algorithm (TD3)
- Soft Actor Critic Algorithm (SAC)
- Behaviour Cloning (BC with DDPG, SAC)
- Prioritized Experience Replay (PER with DDPG)
- From Demonstrations (DDPGfD, SACfD, DQfD)
- Rainbow DQN
- Rainbow IQN (without DuelingNet) - DuelingNet degrades performance
Performance
We have tested each algorithm on some of the following environments.
The performance is measured on the commit 4248057. Please note that this won’t be frequently updated.
Reacher-v2
We reproduced the performance of DDPG, TD3, and SAC on Reacher-v2 (Mujoco). They reach the score around -3.5 to -4.5. See W&B Log for more details.

PongNoFrameskip-v4
RainbowIQN learns the game incredibly fast! It accomplishes the perfect score (21) within 100 episodes! The idea of RainbowIQN is roughly suggested from W. Dabney et al.. See W&B Log for more details.

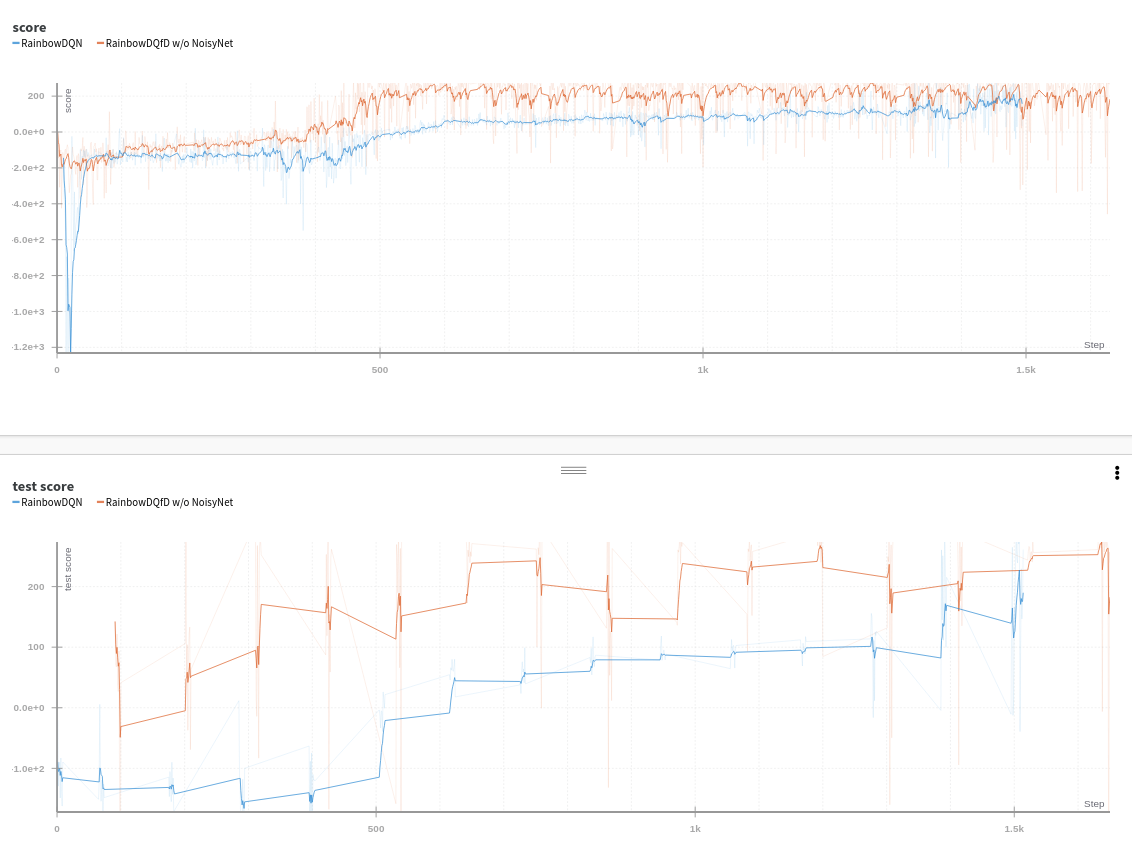
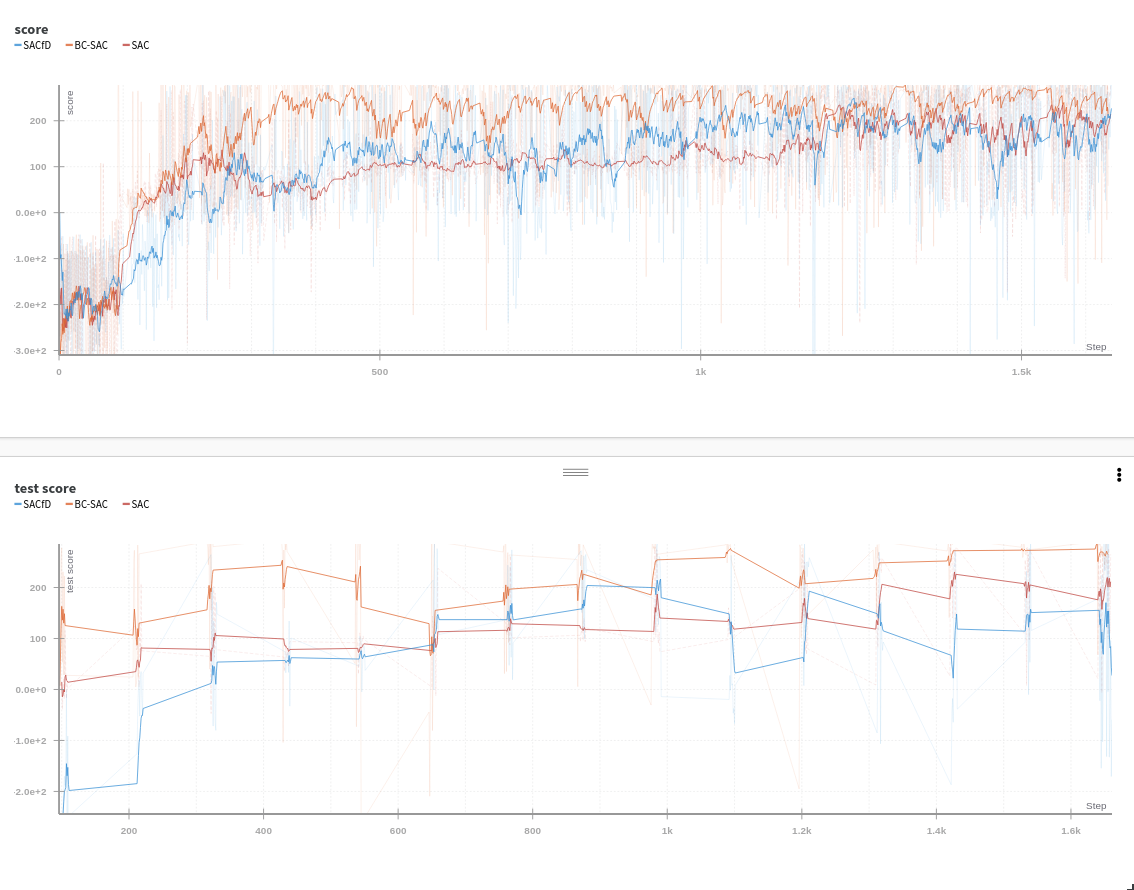
LunarLander-v2 / LunarLanderContinuous-v2
We used these environments just for a quick verification of each algorithm, so some of experiments may not show the best performance. Click the following lines to see the figures.


Getting started
Prerequisites
- This repository is tested on Anaconda virtual environment with python 3.6.1+
$ conda create -n rl_algorithms python=3.6.1 $ conda activate rl_algorithms - In order to run Mujoco environments (e.g.
Reacher-v2), you need to acquire Mujoco license.
Installation
First, clone the repository.
git clone https://github.com/medipixel/rl_algorithms.git
cd rl_algorithms
For users
Install packages required to execute the code. It includes python setup.py install. Just type:
make dep
For developers
If you want to modify code you should configure formatting and linting settings. It automatically runs formatting and linting when you commit the code. Contrary to make dep command, it includes python setup.py develop. Just type:
make dev
After having done make dev, you can validate the code by the following commands.
make format # for formatting
make test # for linting
Usages
You can train or test algorithm on env_name if configs/env_name/algorithm.py exists. (configs/env_name/algorithm.py contains hyper-parameters)
python run_env_name.py --cfg-path <config-path>
e.g. running soft actor-critic on LunarLanderContinuous-v2.
python run_lunarlander_continuous_v2.py --cfg-path ./configs/lunarlander_continuous_v2/sac.py <other-options>
e.g. running a custom agent, if you have written your own configs: configs/env_name/ddpg-custom.py.
python run_env_name.py --cfg-path ./configs/lunarlander_continuous_v2/ddpg-custom.py
You will see the agent run with hyper parameter and model settings you configured.
Arguments for run-files
In addition, there are various argument settings for running algorithms. If you check the options to run file you should command
python <run-file> -h
--test- Start test mode (no training).
--off-render- Turn off rendering.
--log- Turn on logging using W&B.
--seed <int>- Set random seed.
--save-period <int>- Set saving period of model and optimizer parameters.
--max-episode-steps <int>- Set maximum episode step number of the environment. If the number is less than or equal to 0, it uses the default maximum step number of the environment.
--episode-num <int>- Set the number of episodes for training.
--render-after <int>- Start rendering after the number of episodes.
--load-from <save-file-path>- Load the saved models and optimizers at the beginning.
W&B for logging
We use W&B for logging of network parameters and others. For logging, please follow the steps below after requirement installation:
- Create a wandb account
- Check your API key in settings, and login wandb on your terminal:
$ wandb login API_KEY- Initialize wandb:
$ wandb init
For more details, read W&B tutorial.
Class Diagram
Class diagram at #135.
This won’t be frequently updated.

References
- T. P. Lillicrap et al., “Continuous control with deep reinforcement learning.” arXiv preprint arXiv:1509.02971, 2015.
- J. Schulman et al., “Proximal Policy Optimization Algorithms.” arXiv preprint arXiv:1707.06347, 2017.
- S. Fujimoto et al., “Addressing function approximation error in actor-critic methods.” arXiv preprint arXiv:1802.09477, 2018.
- T. Haarnoja et al., “Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor.” arXiv preprint arXiv:1801.01290, 2018.
- T. Haarnoja et al., “Soft Actor-Critic Algorithms and Applications.” arXiv preprint arXiv:1812.05905, 2018.
- T. Schaul et al., “Prioritized Experience Replay.” arXiv preprint arXiv:1511.05952, 2015.
- M. Andrychowicz et al., “Hindsight Experience Replay.” arXiv preprint arXiv:1707.01495, 2017.
- A. Nair et al., “Overcoming Exploration in Reinforcement Learning with Demonstrations.” arXiv preprint arXiv:1709.10089, 2017.
- M. Vecerik et al., “Leveraging Demonstrations for Deep Reinforcement Learning on Robotics Problems with Sparse Rewards.“arXiv preprint arXiv:1707.08817, 2017
- V. Mnih et al., “Human-level control through deep reinforcement learning.” Nature, 518 (7540):529–533, 2015.
- van Hasselt et al., “Deep Reinforcement Learning with Double Q-learning.” arXiv preprint arXiv:1509.06461, 2015.
- Z. Wang et al., “Dueling Network Architectures for Deep Reinforcement Learning.” arXiv preprint arXiv:1511.06581, 2015.
- T. Hester et al., “Deep Q-learning from Demonstrations.” arXiv preprint arXiv:1704.03732, 2017.
- M. G. Bellemare et al., “A Distributional Perspective on Reinforcement Learning.” arXiv preprint arXiv:1707.06887, 2017.
- M. Fortunato et al., “Noisy Networks for Exploration.” arXiv preprint arXiv:1706.10295, 2017.
- M. Hessel et al., “Rainbow: Combining Improvements in Deep Reinforcement Learning.” arXiv preprint arXiv:1710.02298, 2017.
- W. Dabney et al., “Implicit Quantile Networks for Distributional Reinforcement Learning.” arXiv preprint arXiv:1806.06923, 2018.



